| 実験 | 外から見た様子 | カメラの内部画像 |
|---|---|---|
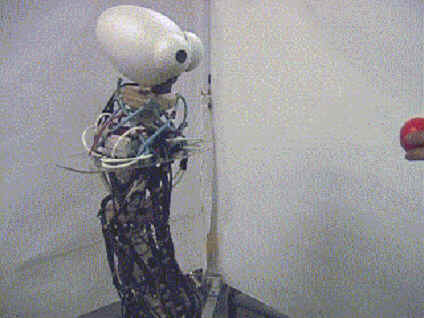
| ターゲットが 視野の中心に くるように姿 勢を制御 |
|
 |
| 外力が加わっ てもタスクを 遂行 |
 |
 |
| 制約条件(体 幹の中ほどを ずらす)下で もタスクを遂 行 |
 |
 |
脊椎型ロボット BeBe
| 実験 | 外から見た様子 | カメラの内部画像 |
|---|---|---|
| ターゲットが 視野の中心に くるように姿 勢を制御 |
|
|
| 外力が加わっ てもタスクを 遂行 |
|
|
| 制約条件(体 幹の中ほどを ずらす)下で もタスクを遂 行 |
|
|