柔軟構造をもつロボットのシミュレーション環境
目的
柔軟構造を含むロボット全体の挙動予測
学習や遺伝的アルゴリズムとの組み合わせによる動作生成
柔軟性の動的変更のシミュレート
ソフトウェア構成
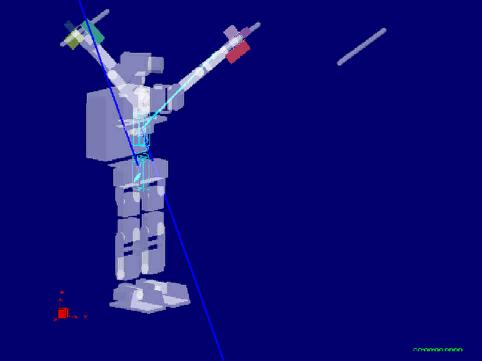
可変柔軟構造の体幹部を持つ人間型ロボットのシミュレーション
体幹部が剛体の場合
体幹部が柔軟な場合
体幹部が剛から柔に変化する場合
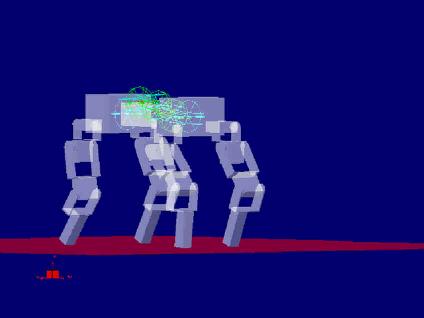
柔軟な脊椎構造を持つ四脚ロボットのシミュレーション
学習前
学習後
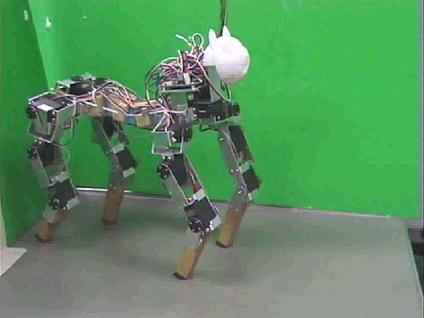
実機による実験
戻る