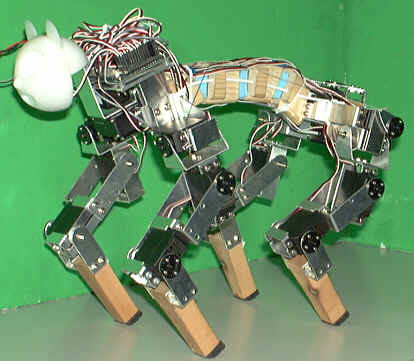
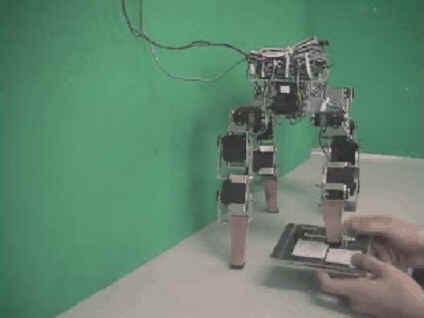
脊椎構造をもつ四脚ロボット SQ43
目的
衝撃吸収性
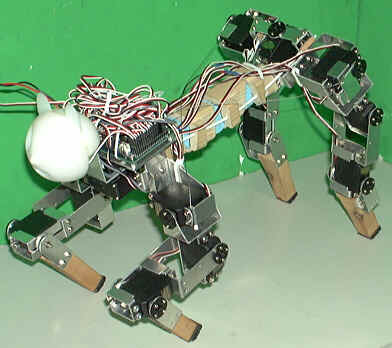
地面の形状になじむ性質を利用した未知の不整地での移動
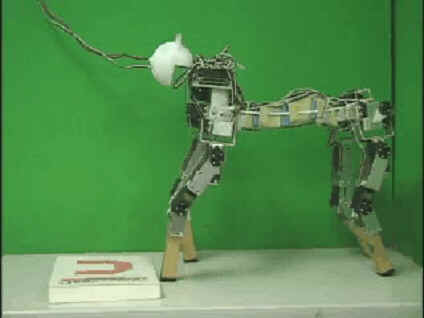
狭い場所での移動
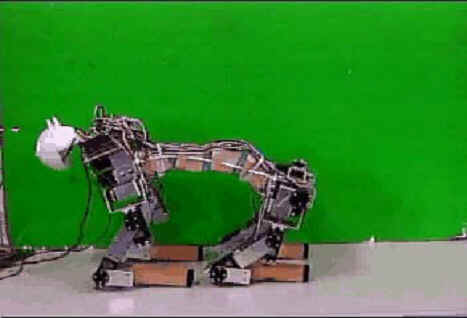
脊椎の柔軟性を生かした姿勢
動作例
戻る