
Features and Advantages
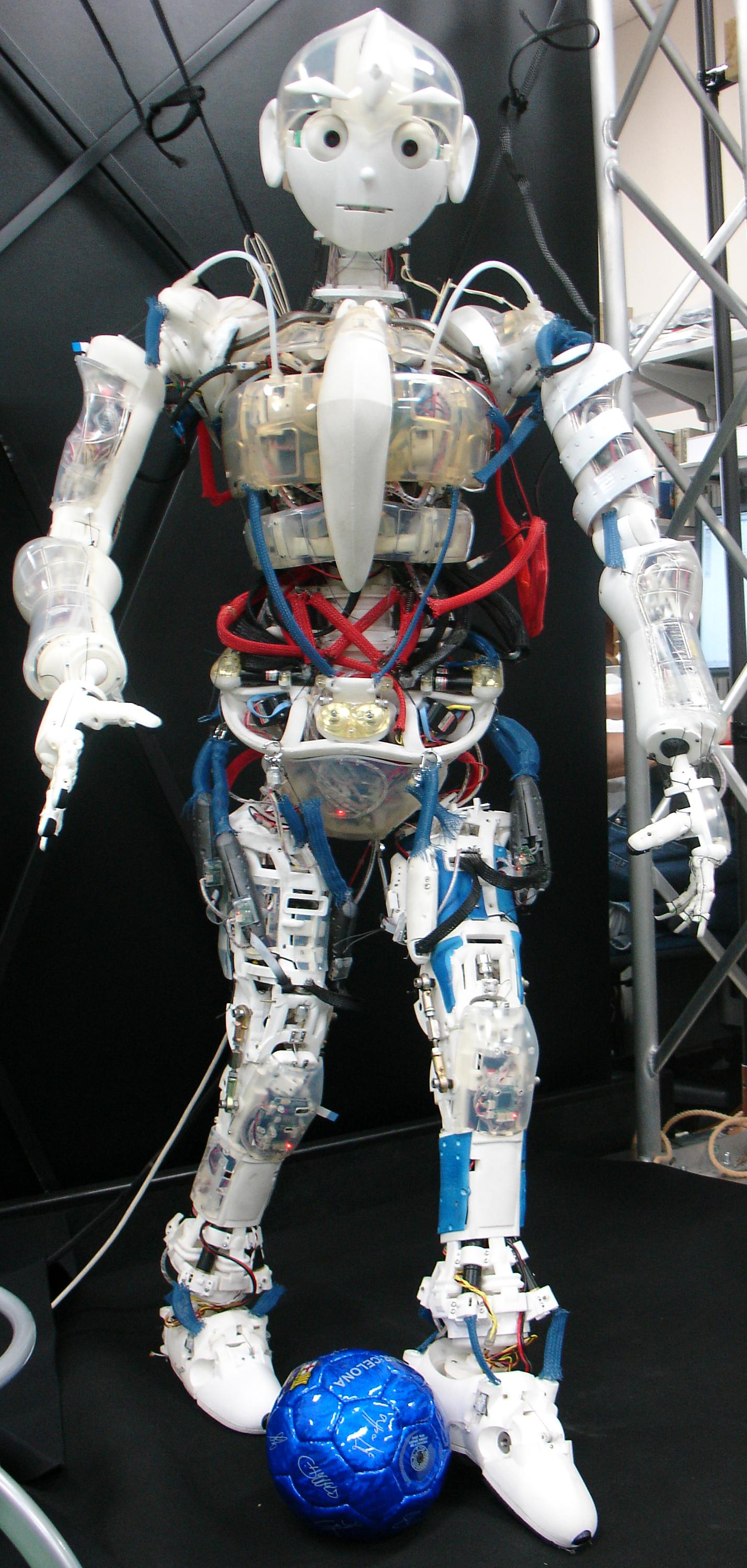
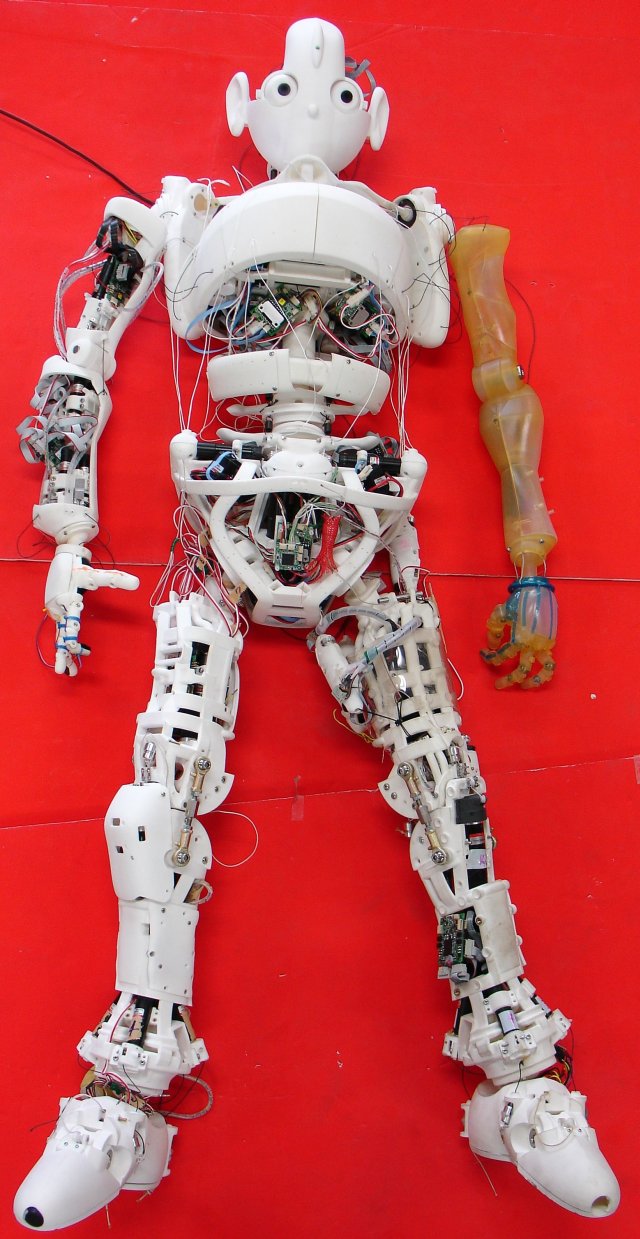
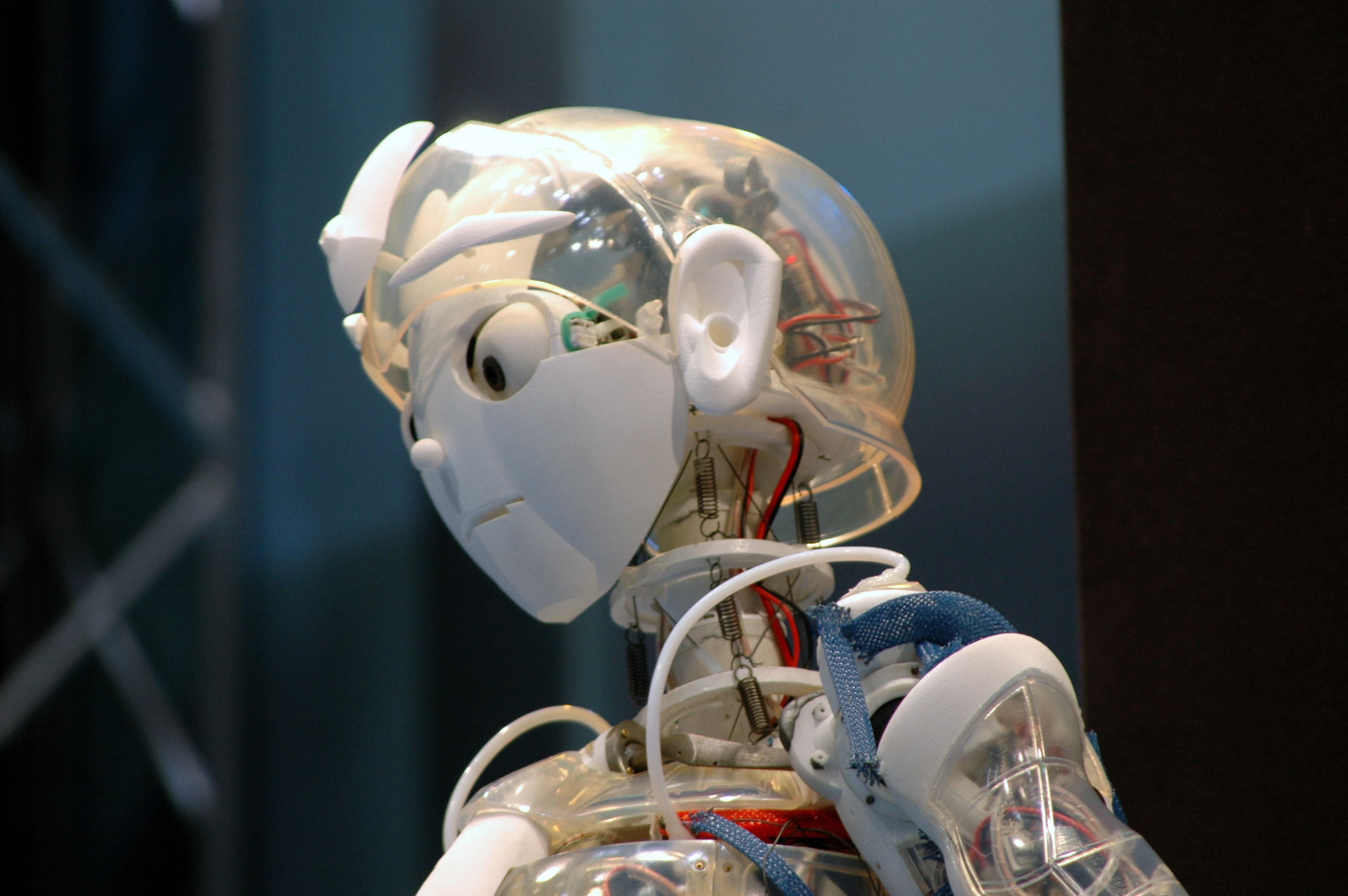
The humanoid 'Kotaro' was developed for the Prototype Robot Exhibition at EXPO2005 held in Aichi, Japan. The purpose of the project was to show (even though at very early stage) long-term future robot technologies originated from Japan. Kotaro project matched the purpose very well, we believe. Below listed are the features and advantages of Kotaro.- Very many degrees of freedom (DOF)
- Modifiable physical softness
- Multi-jointed spine
- Many kinds of many sensors
- Easy rearrangeable muscles (what we call 'reinforceable muscles')
- Distributed onbody system
- Trying to realize learning, self-organizing, autonomous developing, etc...
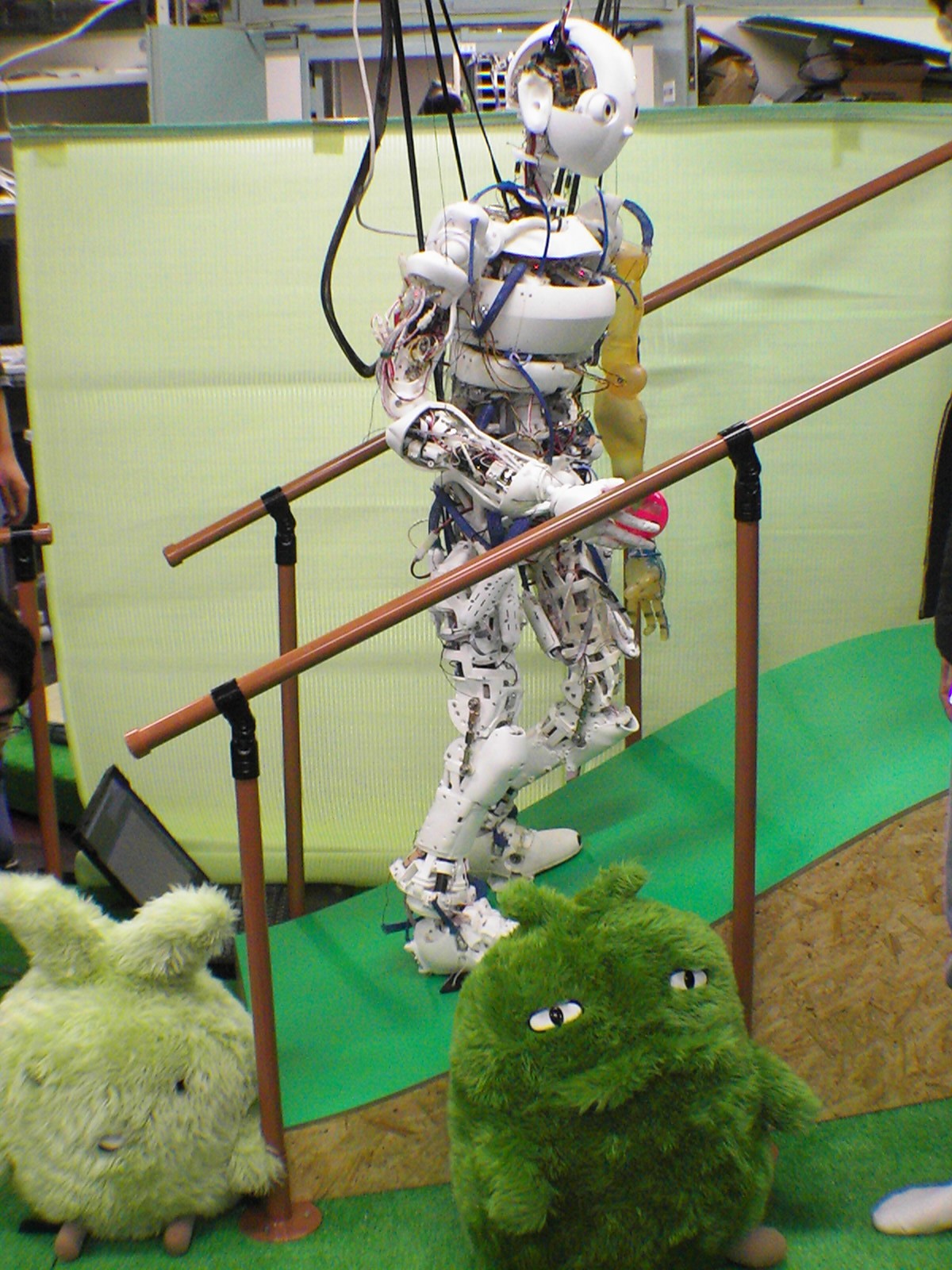
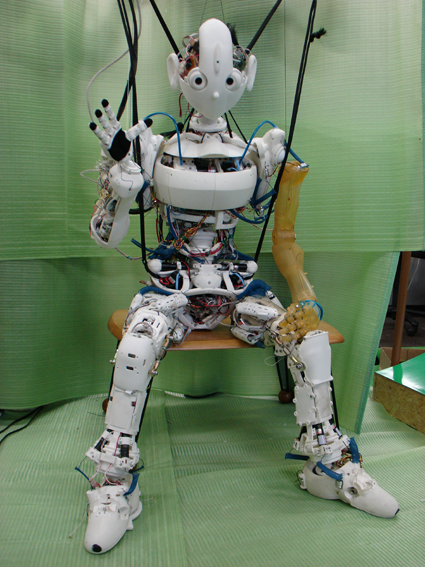
Future Image of Practical Use
The aim is to realize safety, applicability to numerous
diverse tasks, flexibility of the body, and litheness of the
motions of robots. These are necessary fundamental functions
for living in humans' daily lives.
In future, actuators will be replaced by artificial muscles, which are expected to be practical, and then accumulated knowledge by the studies of our direction towards the multiple-DOF musculoskeletal robots.
{kind=link}