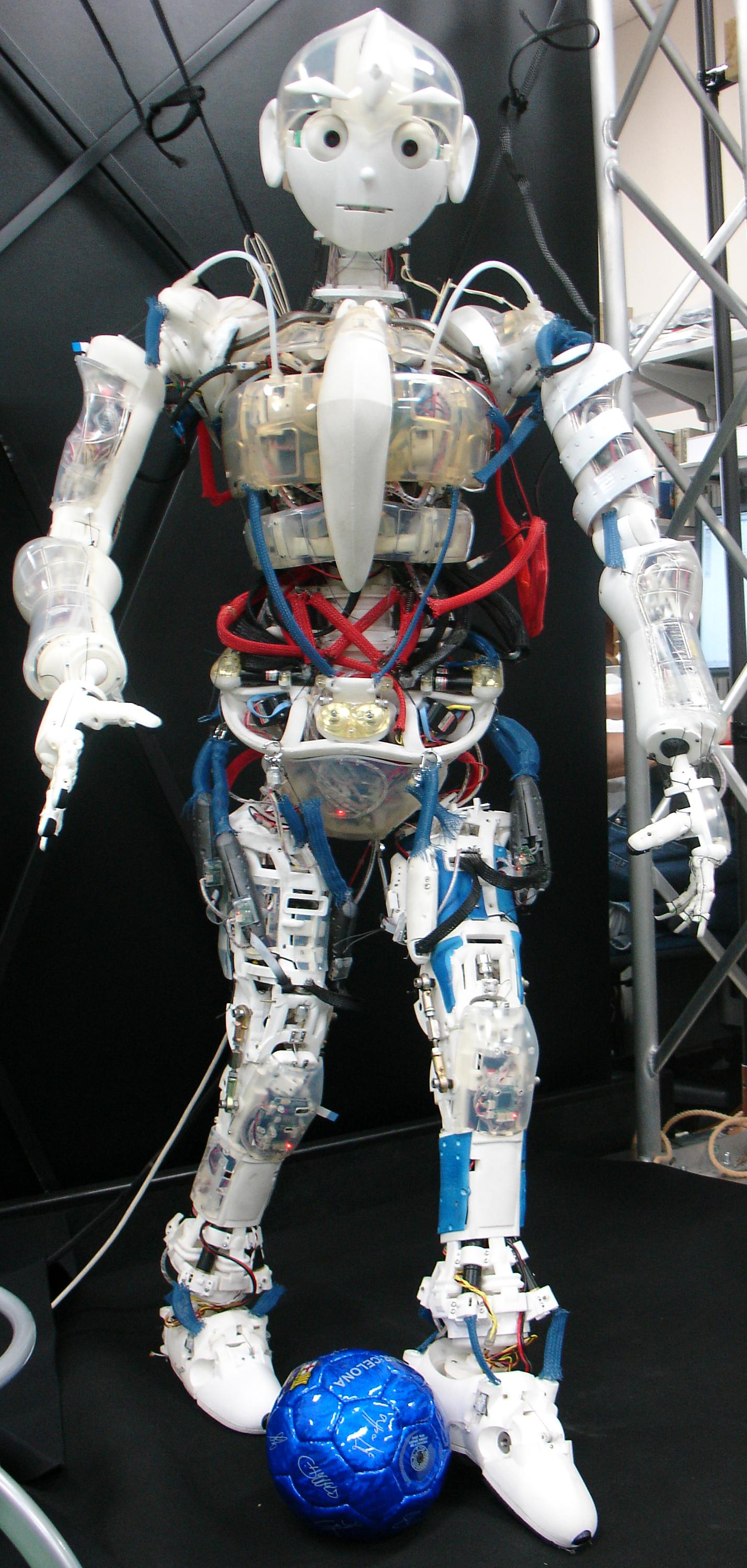

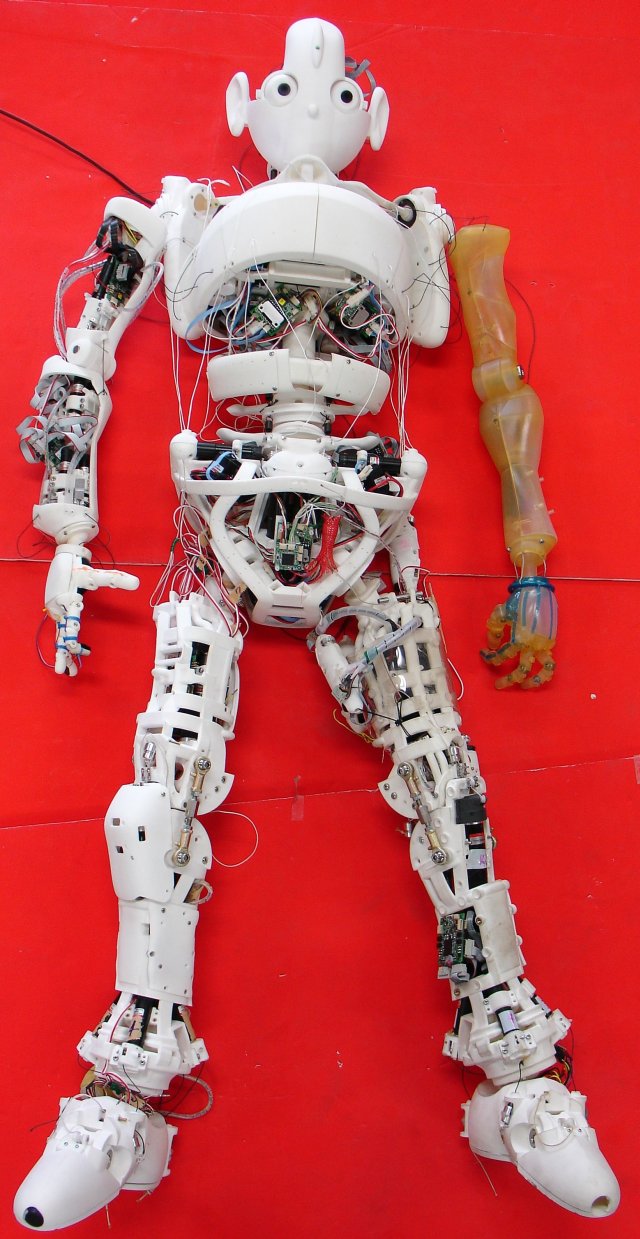
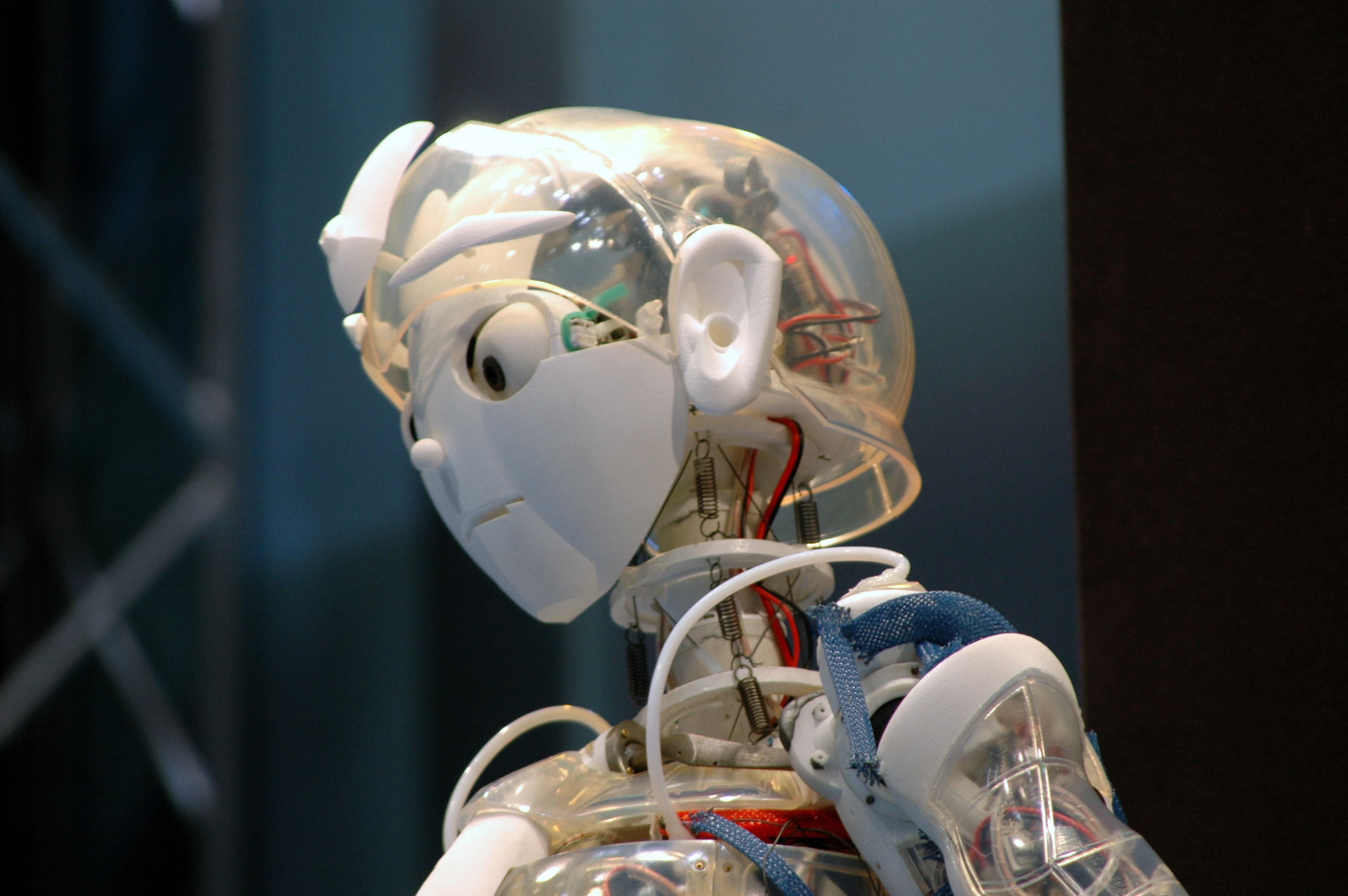
小太郎の技術的特長
超多自由度、柔軟性可変、多節脊椎、多種多感覚、筋配置変更が容易な(増強可能な)筋、体内分散処理系、学習・自己組織化などの特徴を有する全身筋骨格型ヒューマノイドで、2020年というロングタームの実用化を目指した、まさにプロトタイプです。
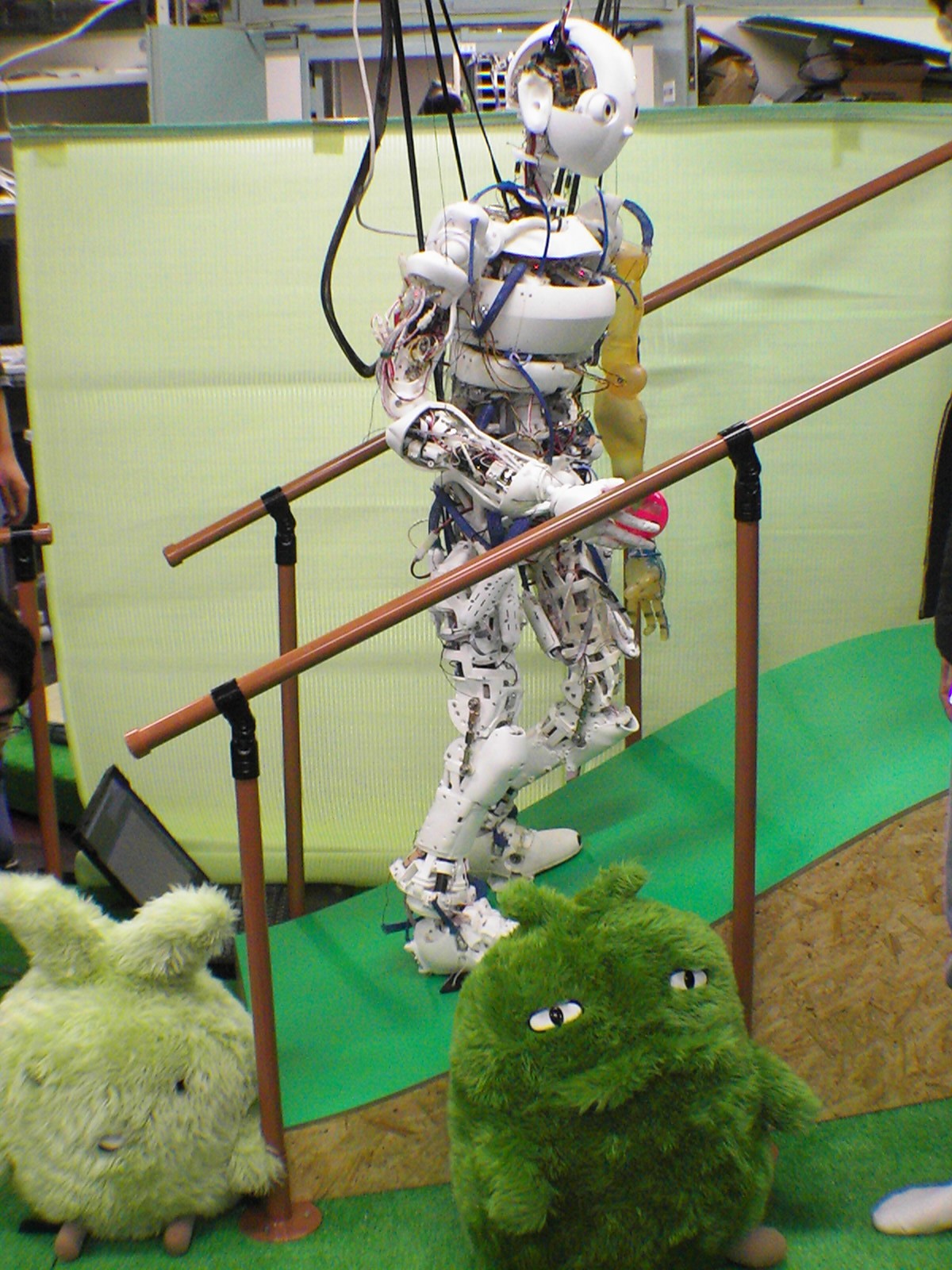
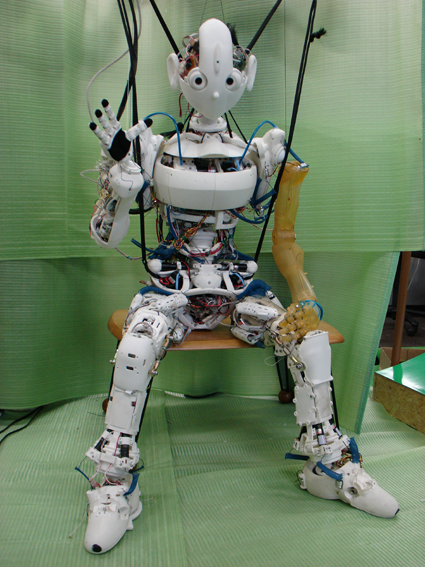
将来の実用化イメージ
人の生活の場での必須機能として、安全性・多様なタスクへの対応・身体の柔らかさ・動作のしなやかさ等を実現します。柔軟性や人間のような身体構造により、安全性と人間のような自然でしなやかな動作を実現し、冗長な多自由度の構成によりこれまでのヒューマノイドの身体構成法と比較して遥かに多様なタスクに対応することが可能になり、タスクのバリエーションが無限に想定される家庭環境においても実際に役に立つことができるヒューマノイドとなります。また、アクチュエータは、将来実用化が期待できる人工筋肉で置き換えられ、多自由度筋骨格型という方向の研究の蓄積が花開くことが期待できます。
{kind=link}