Flexible Spine Robot and Tendon-driven Humanoid
Japanese
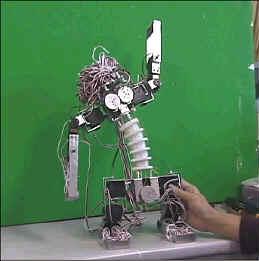
Flexible Spine Robot
- "BeBe": a spine Robot
- Points
- Mechanical flexibility by air artificial muscle
- Artificial muscles are placed by consultation of
human's muscles arrangement.
- How to control a redundant structure: (a general
control method using sensor (vision) information
feedback)
- Perform the task under disturbance or under a
restriction, using the redundancy
- Example motion (tracking)

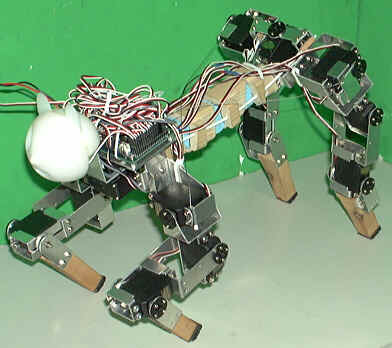
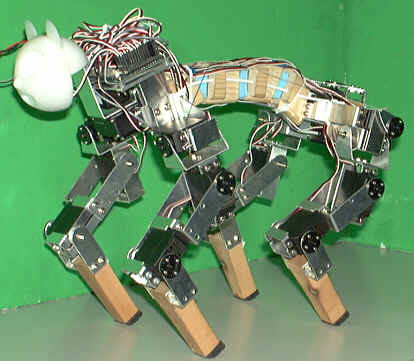
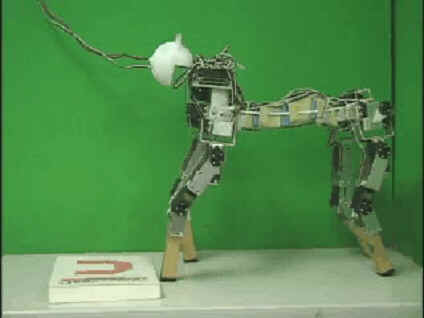
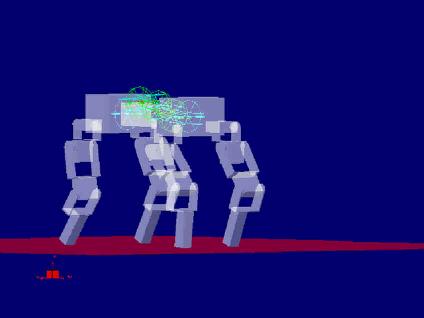
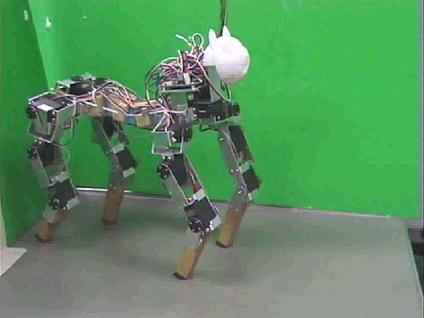
- "SQ43": a quadruped spine robot
- Points
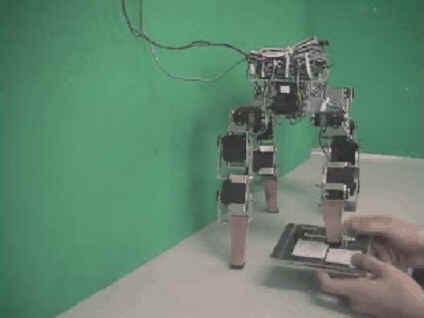
- Shock absorption
- Moving on a irregular surface using adaptation to
the form of the surface
- Moving in a narrow place
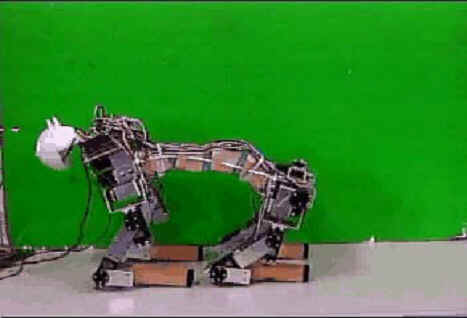
- Some postures using spine's flexibility
- Example motion

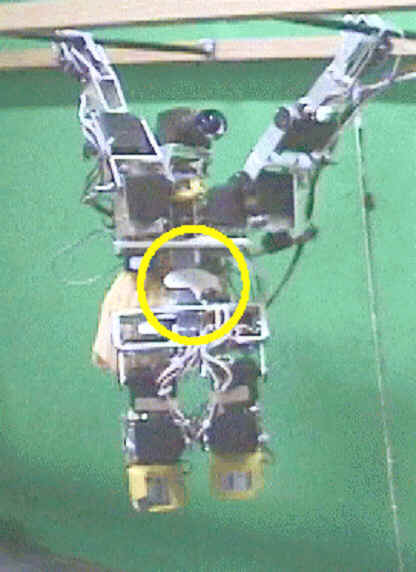
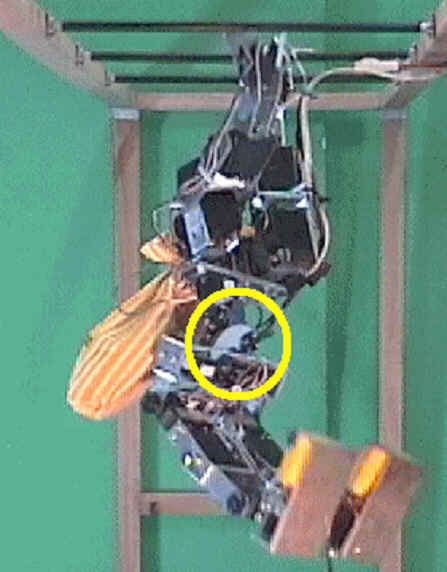
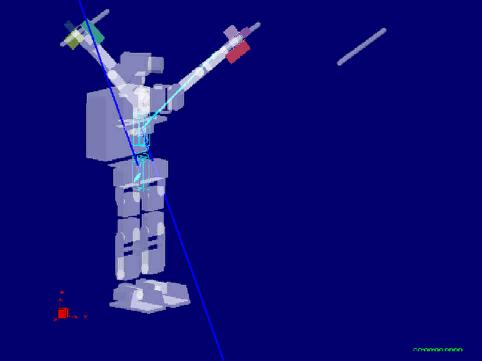
- "Hanzou-S": a human-form robot which has
variable flexibility
- Points
- Dynamical control of the flexibility according to
the situation
- Shock absorption by softening when suspecting a shock
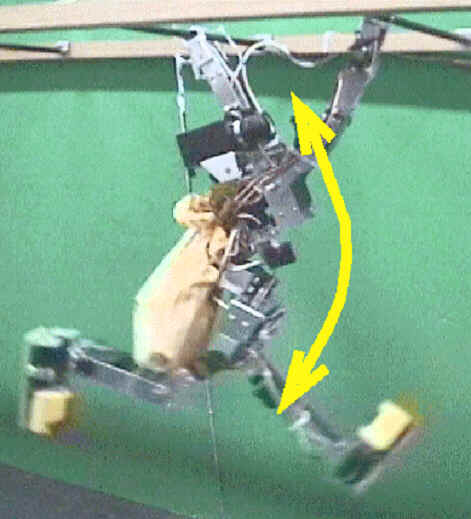
- Dynamic motion of whole-body robot embedded with
flexible structure
- Brachiation (adjusting the flexibility of torso during the
motion)
- Simulation Environment
- Points
- Estimation of any data (inner force of torso, etc)
of whole-body motion
- Motion generation in conjunction with learning or
genetic algorith
- Simulation of dynamical change of the flexibility
- Software
- Dynamically variable flexibility simulation
- A SQ43's motion generated using the simulation environment
(simulation and real robot)
- "Cla": a flexible-spine human-form robot
- Points
- Whole-body motion using the flexible spine
- Example motions (roll-pitch-yaw, pickup an object from the
floor and putting it on the table, throwing an object
using spine)



- Future
- Whole-body motion generation
- Adapting change of parameters
- The motions which is using a releasing energy of stored
elastic energy
- Reference
- Ikuo Mizuuchi, Shigenori Yoshida, Masayuki Inaba, and Hirochika Inoue:
``The Development and Control of the Flexible-Spine of a Human-Form Robot'',
Advanced Robotics, Vol.17, No.2, pp.179--196, 2003
- I. Mizuuchi, M. Inaba, and H. Inoue:
``A Flexible Spine Human-Form Robot --- Development and Control of the Posture of the Spine ---'',
Proceedings of the 2001 IEEE/RSJ International Conference on Intelligent Robots and Systems,
pp.2099--2104, 2001
- I. Mizuuchi, A. Hara, M. Inaba, and H. Inoue:
"Tendon-driven torso control for a whole-body agent which
has multi-DOF spine.", Proc. of the 18th Annual
Conference of the Robotics Society of Japan, Vol.3,
pp.1459--1460, 2000
- A. Hara, I. Mizuuchi, M. Inaba, and H. Inoue:
"The full body robot which has a tendon-driven multi-joint torso.",
Proc. of the 18th Annual Conference of the
Robotics Society of Japan, Vol.3, pp.1433--1434, 2000
- I. Mizuuchi, M. Inaba, and H. Inoue: "Simulation
environment of humanoid robot which has variable soft
structure.", Proc. of the 17th Annual Conference of the
Robotics Society of Japan, Vol.3, pp.1197--1198,
1999
- I. Mizuuchi, T. Matsuki, M. Inaba, and H. Inoue:
"GA-based motion generation for quadruped robot which has
soft spine structure.", Proc. of the 17th Annual
Conference of the Robotics Society of Japan, Vol.1,
pp.199--200, 1999
- T. Kawashima, I. Mizuuchi, H. Yamaguchi, S. Kagami,
M. Inaba, and H. Inoue: "A Hyper-Redundant Spine-Type
Robot with Pneumatic Artificial Muscles", Proc. of 1999
JSME Conference on Robotics and Mechatronics (ROBOMEC'99),
2A1-47-081, 1999
- T. Matsuki, I. Mizuuchi, S. Kagami, M. Inaba, and
H. Inoue: "Motion Generation and Action Control of A
Walking Quadruped Robot with Flexible Spine Structure",
Proc. of 1999 JSME Conference on Robotics and Mechatronics
(ROBOMEC'99), 1P2-42-063, 1999
- I. Mizuuchi, T. Matsuki, M. Inaba, and H. Inoue:
"Simulation environment of humanoid robot which contains
soft structure, and its application to real robot's motion
generation", Proc. of 1999 JSME Conference on Robotics
and Mechatronics (ROBOMEC'99), 2A1-47-085, 1999
- T. Matsuki, I. Mizuuchi, S. Kagami, M. Inaba, and
H. Inoue: "Quadruped Robot with Spine Structure and
Simulation Environment", Proc. of the 16th Annual
Conference of the Robotics Society of Japan, Vol.1,
pp.85--86, 1998
- I. Mizuuchi, T. Matsuki, M. Inaba, and H. Inoue:
"An Approach to a Humanoid That Has a Variable Flexible
Torso", Proc. of the 16th Annual Conference of the
Robotics Society of Japan, Vol.2, pp.825--826, 1998
Tendon-driven Humanoid
"TH1": Tendon-driven Humanoid
- Reference
- H. Yamaguchi, R. Kageyama, M. Inaba, and H. Inoue: "A
Tendon-Driven 3-Dimensional Bipedal Walking Robot --
Research on Tendon-Driven Humanoid Robots(1) --",
Proc. of the 17th Annual Conference of the Robotics
Society of Japan, pp.359--360, 1999
- R. Kageyama, K. Nishiwaki, S. Kagami, H. Yamaguchi,
M. Inaba, and H. Inoue: "Angle sensing element using
magnetic coils ---Research on Tendon-Driven Humanoid
Robots(2)---", Proc. of the 17th Annual Conference of the
Robotics Society of Japan, pp.357--358, 1999
- H. Yamaguchi, K. Nagashima, R. Kageyama, M. Inaba, and
H. Inoue: "A Development of a Fully Tendon-Driven
Humanoid Robot", Proc. of the Fifth Robotics Symposia,
pp.323--326, 2000
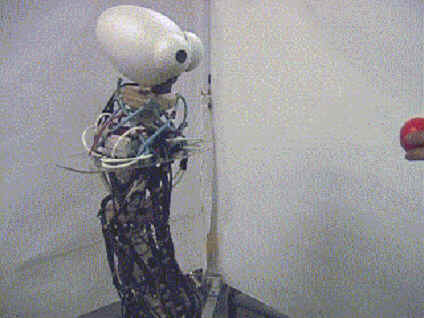
Whole-Body Tendon-Driven Humanoid with Flexible Spine
- Points
- Whole-body motions using the flexible spine
- Human-like natural motion
- How to build and control a complexed-structure
many-DOF robot
- Example motions (bending torso, playing back the directly
taught motion, tracking an object by vision using
eye-balls,neck,and spine cooperatively)


- Reference
- Ikuo Mizuuchi, Tomoaki Yoshikai, Shigenori Yoshida, Yuto Nakanishi, Noritaka Ohtake, Masayuki Inaba, and Hirochika Inoue:
``Study on Information System for Robots of Complex Body Structure``,
The 21st Annual Conference of The Robotics Society of Japan, 3H33, 2003
- Ikuo Mizuuchi, Hironori Waita, Yuto Nakanishi, Tomoaki Yoshikai, Masayuki Inaba, and Hirochika Inoue:
``A Musculo-Skeletal Robot Leg Capable of Adding or Rearrainging the Muscles'',
The 21st Annual Conference of The Robotics Society of Japan, 1C29, 2003
- Ikuo Mizuuchi, Yuto Nakanishi, Tomoaki Yoshikai, Masayuki Inaba, and Hirochika Inoue:
``A Software System where Body Information of Redundant Musculo-Skeletal humanoid'',
The 21st Annual Conference of The Robotics Society of Japan, 1C2a, 2003
- Tomoaki Yoshikai, Ikuo Mizuuchi, Masayuki Inaba, and Hirochika Inoue:
``Acquisition of an imitation behavior in Kenta with R-learning algorithm'',
The 21st Annual Conference of The Robotics Society of Japan, 2A28, 2003
- Ikuo Mizuuchi, Tomoaki Yoshikai, Daisuke Sato, Shigenori Yoshida, Masayuki Inaba, and Hirochika Inoue:
``Behavior Developing Environment for the Large-DOF Muscle-driven Humanoid Equipped with Numerous Sensors'',
In Proceedings of the 2003 IEEE International Conference on Robotics and Automation, pp.1940--1945, 2003
- Tomoaki Yoshikai, Shigenori Yoshida, Ikuo Mizuuchi, Daisuke Sato, Masayuki Inaba, and Hirochika Inoue:
``Multi-sensor guided behaviors in whole body tendon-driven humanoid Kenta'',
Proceedings of the 2003 IEEE Conference on Multisensor Fusion and Integration for Intelligent Systems(MFI), pp.--, 2003
- Tomoaki Yoshikai, Ikuo Mizuuchi, Daisuke Sato, Shigenori Yoshida, Masayuki Inaba, and Hirochika Inoue:
"Behavior System Design and Implementation in Spined Musle-Tendon Humanoid 'Kenta'",
Journal of Robotics and Mechatronics, Vol.15, No.2, pp.143--152, 2003
- Tomoaki Yoshikai, Ikuo Mizuuchi, Masayuki Inaba, and Hirochika Inoue:
``Development and Implementation of the auditory information processing system for audition-based behavior in humanoid Kenta'',
2003 JSME Conference On Robotics And Mechatronics, 2A1-1F-E4, 2003
- Masayuki Inaba, Ikuo Mizuuchi, Ryosuke Tajima, Tomoaki Yoshikai, Daisuke Sato, Koichi Nagashima, and Hirochika Inoue:
``Building Spined Mustle-Tendon Humanoid'',
in Robotics Research: The Tenth International Symposium, Springer Verlag, pp.113--130, 2003
- Ikuo Mizuuchi, Tomoaki Yoshikai, Daisuke Sato, Shigenori Yoshida, Masayuki Inaba, and Hirochika Inoue:
"Swing Motion by a Spined Whole-Body Tendon-Driven Humanoid ``Kenta''",
Proceedings of the 20th Annual Conference of the Robotics Society of Japan, 1C38, 2002
- Tomoaki Yoshikai, Ikuo Mizuuchi, Daisuke Sato, Shigenori Yoshida, Masayuki Inaba, and Hirochika Inoue:
``Imitation behaviors of Kenta by behavioral integration with reflexes'',
Proceedings of the 20th Annual Conference of the Robotics Society of Japan, 1C36, 2002
- Daisuke Sato, Ikuo Mizuuchi, Tomoaki Yoshikai, Masayuki Inaba, and Hirochika Inoue:
``Human Intention Recognition System by a Robot with Sensors'',
Proceedings of the 20th Annual Conference of the Robotics Society of Japan, 3G19, 2002
- Ikuo Mizuuchi, Ryosuke Tajima, Tomoaki Yoshikai, Daisuke Sato, Koichi Nagashima, Masayuki Inaba, Yasuo Kuniyoshi, and Hirochika Inoue:
"The Design and Control of the Flexible Spine of a Fully Tendon-Driven Humanoid ``Kenta''",
Proceedings of the 2002 IEEE/RSJ International Conference on Intelligent Robots and Systems,
pp.2527--2532, 2002
- Tomoaki Yoshikai, Daisuke Sato, Ryosuke Tajima, Ikuo Mizuuchi, Yasuo Kuniyoshi, Masayuki Inaba, and Hirochika Inoue:
``Adaptive behavior of tendon-driven humanoid 'Kenta' by integration among voluntary behaviors,reflexes,and reactive behaviors'',
2002 JSME Conference On Robotics And Mechatronics, 2P2-L06, 2002
- Ikuo Mizuuchi, Ryosuke Tajima, Koichi Nagashima, Tomoaki Yoshikai, Daisuke Sato, Masayuki Inaba, Yasuo Kuniyoshi, and Hirochika Inoue:
``The extensible onbody system of the whole-body tendon-driven spine-humanoid Kenta which has multiple types of inputs/outputs'',
2002 JSME Conference On Robotics And Mechatronics, 1P1-F02, 2002
- Masayuki Inaba, Ikuo Mizuuchi, Ryosuke Tajima, Tomoaki Yoshikai, Koichi Nagashima, and Hirochika Inoue:
``Building Spined Muscle-Tendon Humanoid'',
Proceedings of International Symposium on Robotics Research, 2001
- M. Inaba, K. Nagashima, I. Mizuuchi, R. Tajima, T. Yoshikai, Y. Kuniyoshi, and H. Inoue:
"Development of the tendon-driven humanoid `Kenta' with flexible spine",
Proc. of the 19th Annual Conference of the Robotics Society of Japan,
pp.775--776, 2001
- I. Mizuuchi, M. Inaba, K. Nagashima, R. Tajima, T. Yoshikai, Y. Kuniyoshi, and H. Inoue:
"Design and control of a flexible spine for the whole-body humanoid `Kenta'",
Proc. of the 19th Annual Conference of the Robotics Society of Japan,
pp.777--778, 2001
- R. Tajima, I. Mizuuchi, T. Yoshikai, K. Nagashima, Y. Kuniyoshi, M. Inaba, and H. Inoue:
"The Limb Structure with Ball and Socket Joints for the Humanoid `Kenta'",
Proc. of the 19th Annual Conference of the Robotics Society of Japan,
pp.779--780, 2001
- T. Yoshikai, M. Inaba, I. Mizuuchi, R. Tajima, K. Nagashima, H. Waita, Y. Kuniyoshi, and H. Inoue:
"Eyeball structure and attention control for the flexible-spine humanoid `Kenta' --- Kenta: A tendon-driven humanoid with flexible spine ---",
Proc. of the 19th Annual Conference of the Robotics Society of Japan,
pp.781--782, 2001
- M. Inaba, I. Mizuuchi, R. Tajima, T. Yoshikai, K. Nagashima, H. Waita, Y. Kuniyoshi, and H. Inoue:
"Adaptive body reactions to nursing operations for training with humanoid",
Proc. of the 19th Annual Conference of the Robotics Society of Japan,
pp.783--784, 2001
Note:
- Moving pictures are limited in the laboratory.
Last modified: Thu Dec 04 23:21:27 JST 2003