






研究の概要
人間の身体構造に学んだヒューマノイド身体構成法やその制御法や、キッチンアシスタントロボット、ロボット知能化コンポーネント等の研究を進めていますが、ロボットや知能機械に関連する分野を広く扱います。
研究キーワードは以下の通りです(限定するという意味ではありません):ロボティクス、メカトロニクス、ヒューマノイド、筋骨格型ヒューマノイド構成法、生活支援ロボット、知能機械構成法、自律システム、ロボットアーキテクチャ、ロボットデザイン、ロボット制御、ロボット基盤ソフトウェアなど。
※未発表の研究はここには掲載しません。研究室に興味のある方はご連絡ください。
目次
人間の身体構造に学んだヒューマノイド身体構成法とその制御法
筋骨格型ヒューマノイド「小太郎」
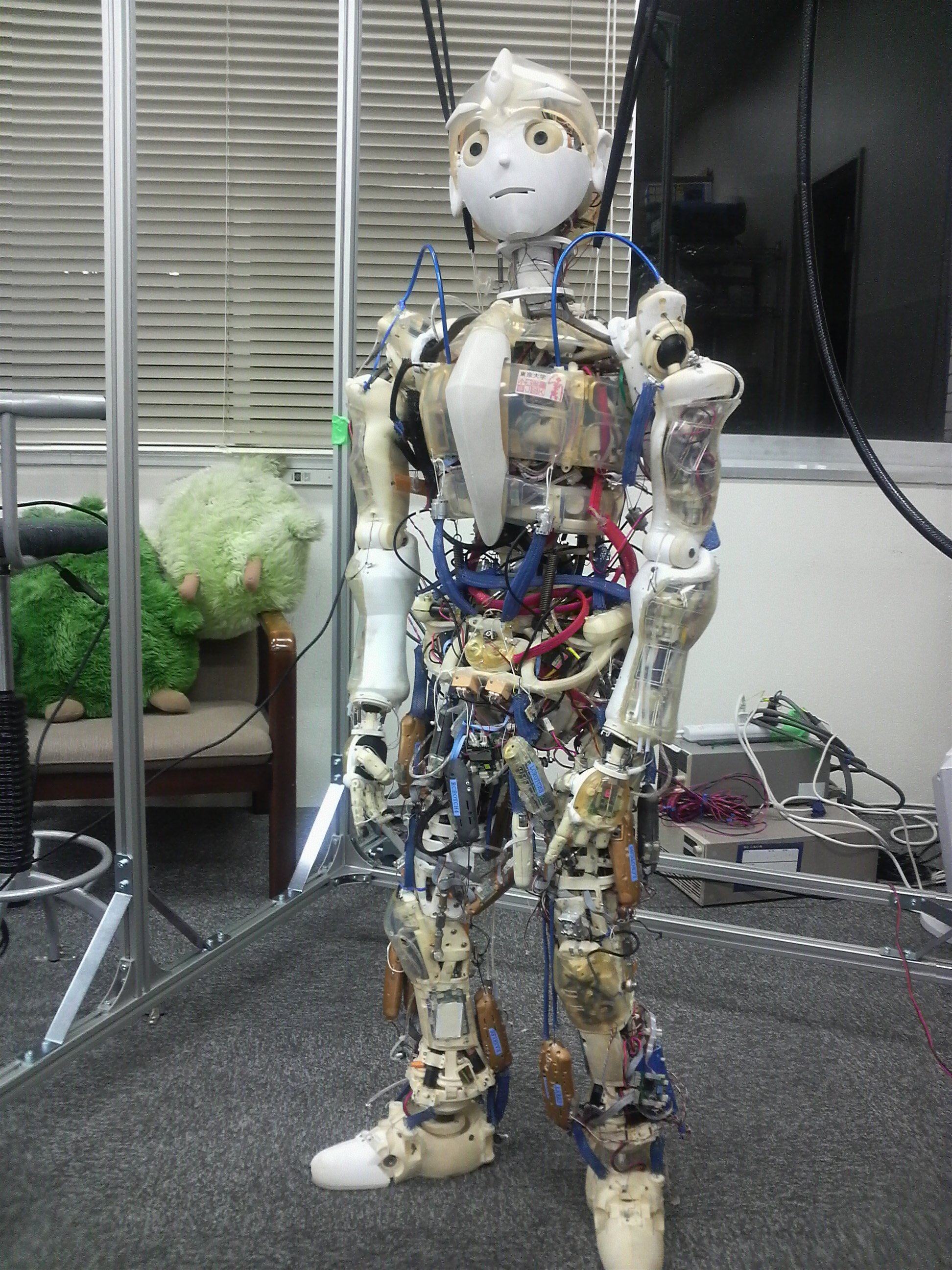
- 人間の身体構造に学ぶことで、ロボットの身体や動きの 硬さや不自然さを解消し、柔からさ・しなやかさ・安全性・親しみやすさを実現することを目指しています。 従来の機械が「精度」や「剛性」を重視して発展してきたのに対し、設計・制御のパラダイムを転換し、柔らかい身体でもやりたいことができるという制御法を確立することができれば、人間の生活の場で活躍できるロボットの実現に対して大きなブレークスルーになると思っています。
- 小太郎の技術的特長
超多自由度、柔軟性可変、多節脊椎、多種多感覚、筋配置変更が容易な(増強可能な)筋、体内分散処理系、学習・自己組織化などの特徴を有する全身筋骨格型ヒューマノイドで、2020年というロングタームの実用化を目指した、まさにプロトタイプです。 - 将来の実用化イメージ
人の生活の場での必須機能として、安全性・多様なタスクへの対応・身体の柔らかさ・動作のしなやかさ等を実現します。柔軟性や人間のような身体構造により、安全性と人間のような自然でしなやかな動作を実現し、冗長な多自由度の構成によりこれまでのヒューマノイドの身体構成法と比較して遥かに多様なタスクに対応することが可能になり、タスクのバリエーションが無限に想定される家庭環境においても実際に役に立つことができるヒューマノイドとなります。また、アクチュエータは、将来実用化が期待できる人工筋肉で置き換えられ、多自由度筋骨格型という方向の研究の蓄積が花開くことが期待できます。 - 2005年、愛知万博に出展するプロジェクトで開発したロボットです。
- 小太郎のホームページ
柔軟性を持つロボットの身体構成法とその制御法
空気圧アクチュエータ駆動システム
- 空気圧アクチュエータを利用して柔軟性を持つロボットの身体構成法を研究しています。
柔軟性を持つロボットの制御法
- 弾性要素をロボットの制御に活用する方法に関する基礎研究を行っています。
キッチンアシスタントロボット

- 壊れ易い食器を扱い、食器洗い・片付け支援の実現を目指しています。
- 近接・触覚・力感覚のセンサ統合利用の手探りマニピュレーションの方法を研究します。
- センサのシミュレーションも可能なプログラミング環境を開発しました。
- パナソニックと共同研究で開発したロボットです。
家庭内自律作業ロボット
- 家庭内を自律的に動き回って作業をするロボットの研究です。
- ロボットのために整備された環境(工場など)ではない環境(家庭)で知的に行動するというところに、難しさがあります。
- 高齢者宅や共働き家庭、一人暮らし家庭にもありがたいロボットを目指します。
- 作業の種類はだんだん増やしていきます。
ロボット知能化コンポーネント
生活環境情報収集知能モジュール

- 秋葉原で買える安価なセンサを使って、生活環境の情報を収集するロボットシステムです。
- 焦電センサ(人感センサ)、温度センサ、湿度センサ、気圧センサ、においセンサ、照度センサ、3軸加速度センサ、磁気センサ、追加センサ用コネクタが付いています(右図)。省電力のモードなら単三乾電池2本で約1ヶ月間稼動可能です。ZigBeeによる無線通信で外部に情報を送れます。Trans New Technology社より購入可能です。
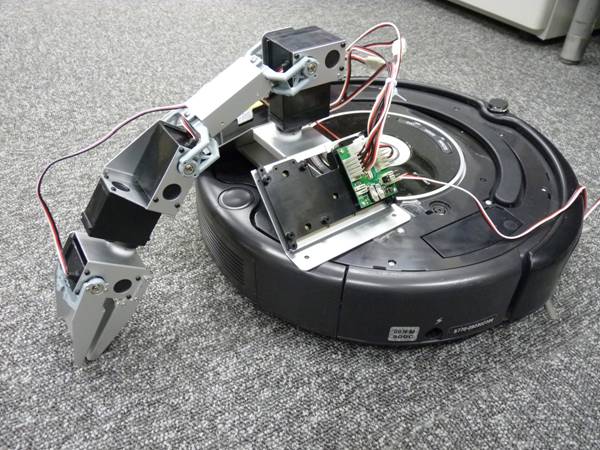
- 左図は、指向性の高い焦電センサを8個45度おきに設置し、2自由度の回転機構(スリップリングにより無限回転)の付いたロボットです。焦電センサは、熱源の動きに反応します(動かないと反応しない)が、自ら動くことで静止した熱源の方向も推定できます。
- NEDOの「次世代ロボット知能化プロジェクト」により進めている研究で、OpenRT PlatformのRTコンポーネントにより、容易に他のロボットシステムに組み込むことができます。

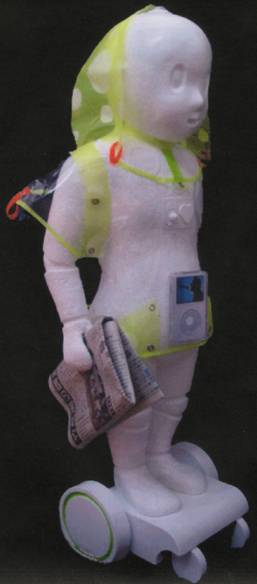
ロボット知能化ソフトウェアプラットフォーム(OpenRTP)検証用リファレンスハードウェア
- NEDOの「次世代ロボット知能化技術開発プロジェクト」で開発されたロボットです。OpenRT Platformで、プログラミングを行うベースとなる標準ロボット(リファレンスハードウェア)です。
- 上の生活環境情報収集知能モジュールを組み込んで実験を行います。
- 後ろに写っているのは、iRobot社(iRobot Corp.)のロボット掃除機「ルンバ(Roomba)」です。ルンバもロボット知能化の研究に利用しています。
